День 1
Дата: 2025-03-04
Имя: Варя
Задачи на сегодняшнее занятие:
- Собрать робота
- Сделать анализ показаний на роботе
Проблемы:
- Робот слишком большой, зацепляется.
Решения:
- Уменьшила размер робота, теперь вроде все хорошо.
Выполненные сегодня задачи
- Собран робот
- Прочитала показания с робота, на следующем занятии планирую попробовать сделать движение по линии.
На роботе установлены следующие компоненты:
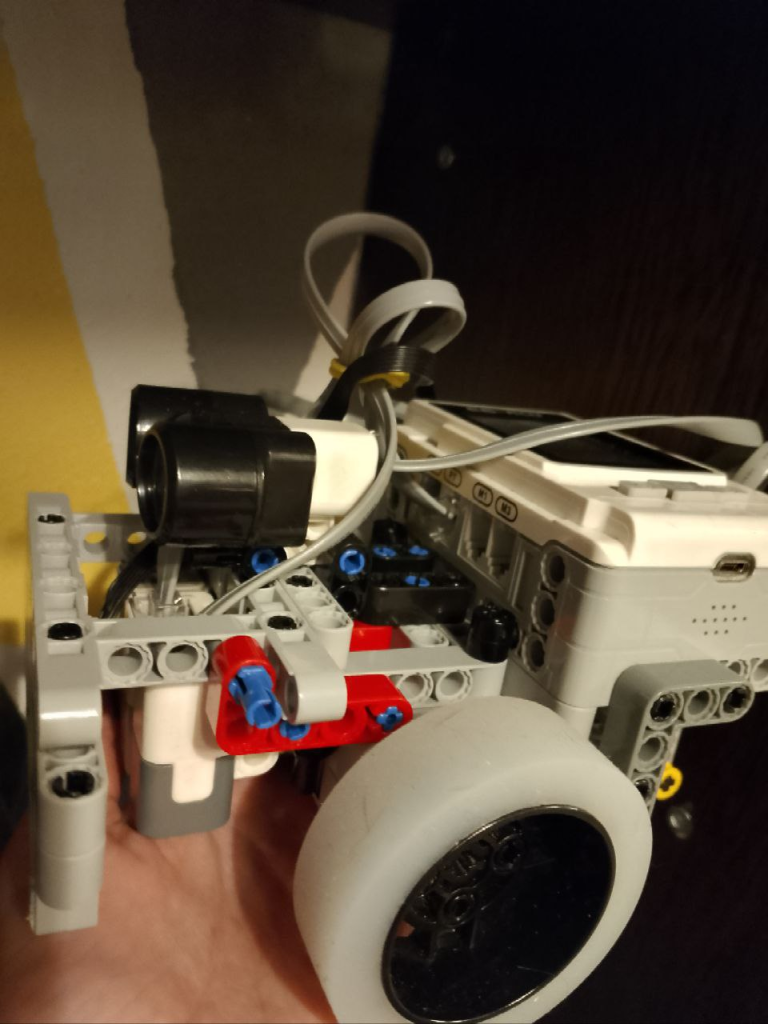
- УЗ датчик расстояния
- 2 датчика цвета
- Модуль линии
- Контроллер e6-rcu
- 2 Спортивных мотора
- 2 Силиконовых колеса
- Идея 1: Разработать подпрограмму для движения по линии.
- Идея 2: Добавить в робота датчик света для точности поворота, объезда препятствий и т.п
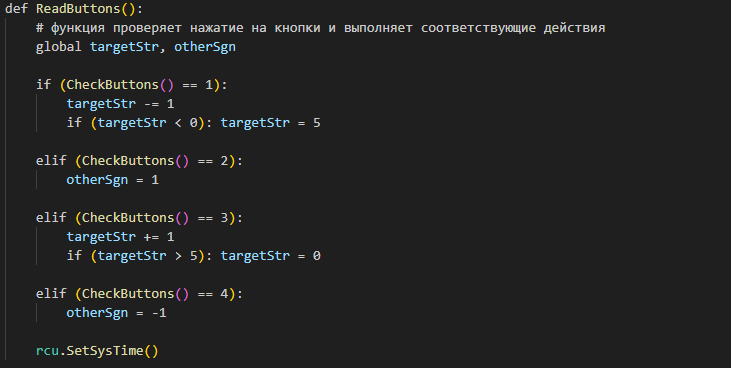
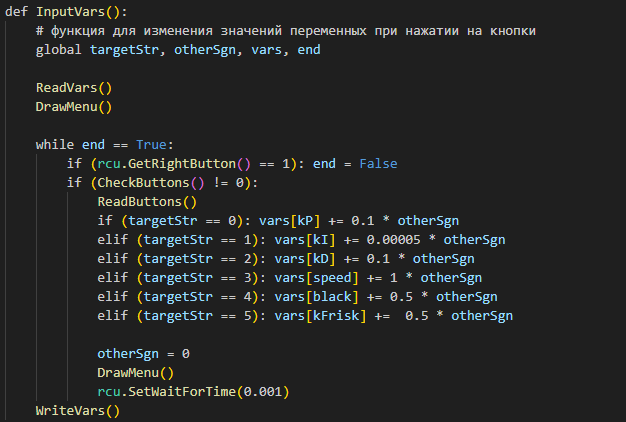
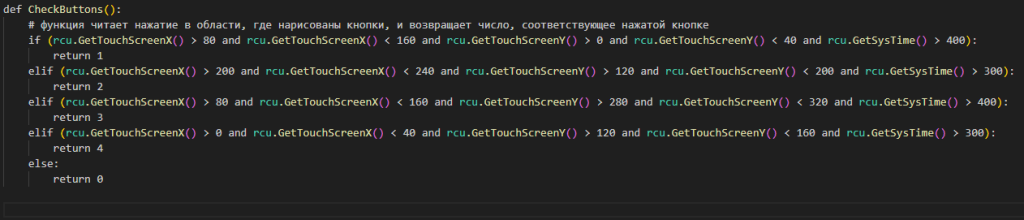
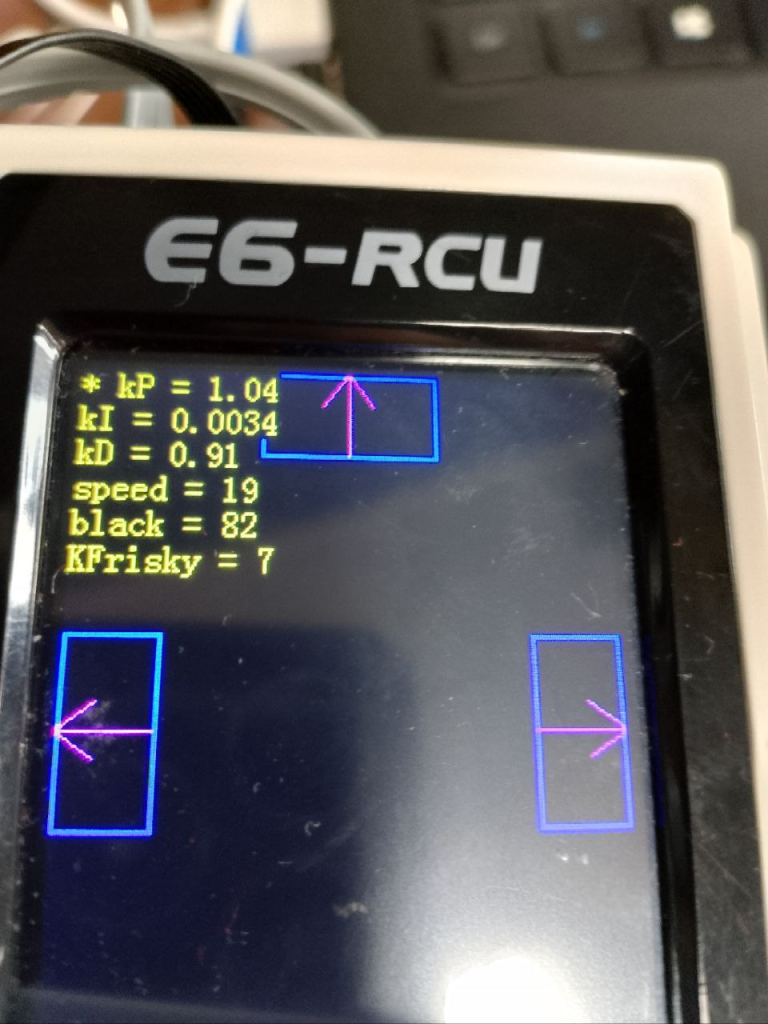
Я реализовала кнопки, с помощью которых можно менять значения с робота прямо с контроллера.
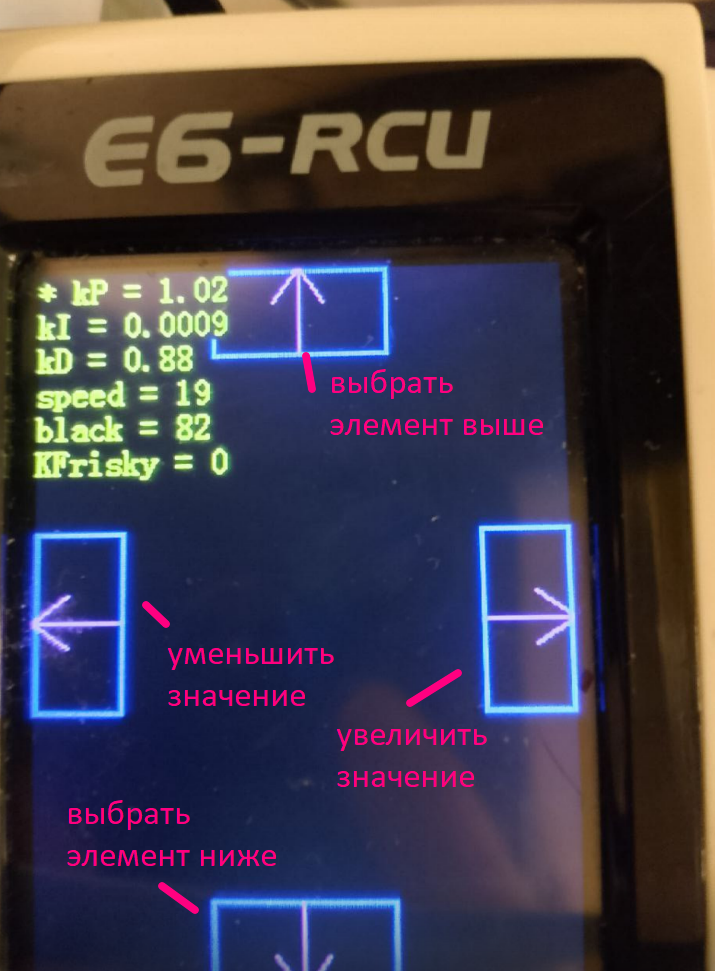
На фото изображены 4 кнопки, с помощью. которых можно производить изменения переменных, которые в дальнейшем будут использоваться в движении по линии. Это было сделано, чтобы настраивать значения прямо с контроллера, не отходя от полигона, чтобы не подключать робота к компьютеру, не изменять в программе коэффициенты и т.п
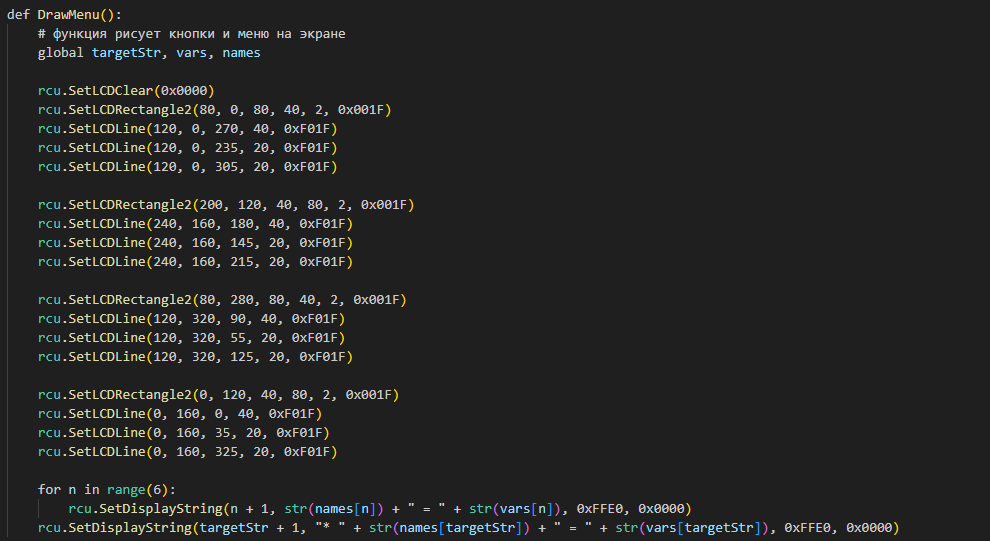
код:
День 2
Дата: 2025-03-06
Имя: Варя
Задачи на сегодняшнее занятие:
- Написать подпрограмму для движения по линии.
Проблемы:
Робот слетает с линии
Решения:
- Увеличила показания черного цвета.
Алгоритм следования по линии:
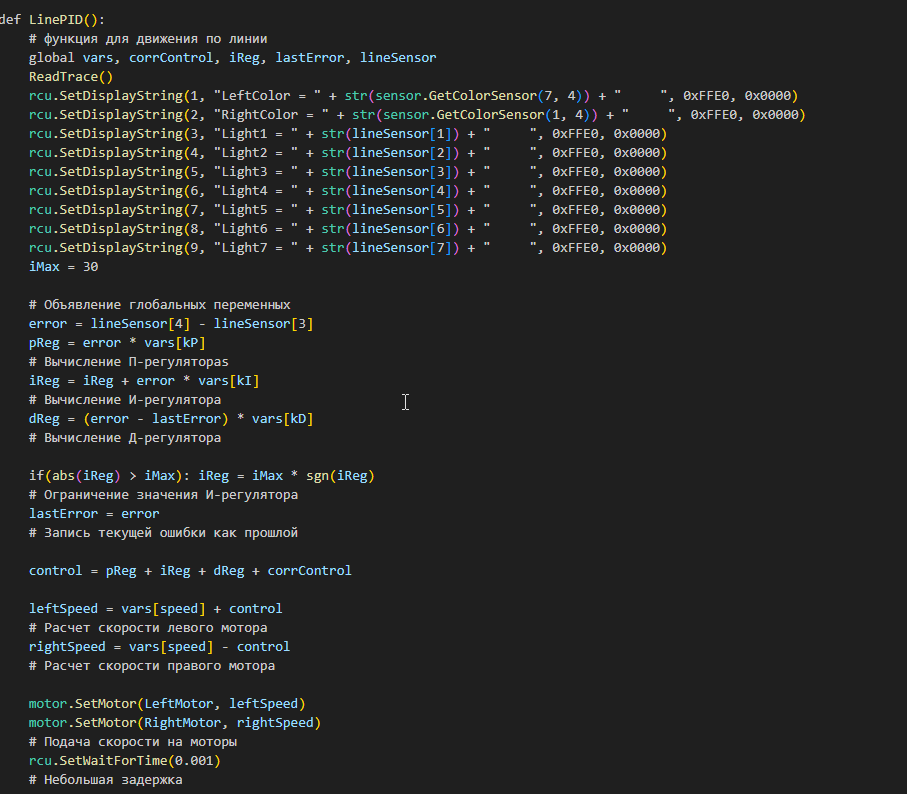
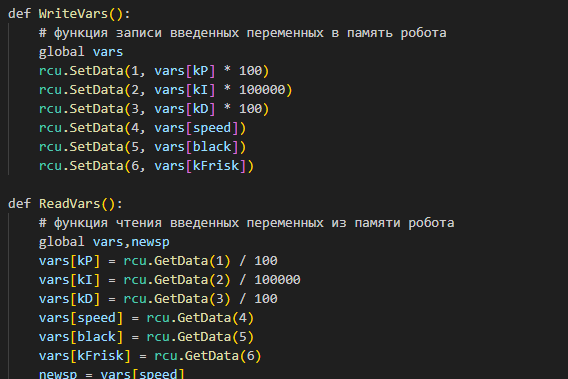
vars[] — массив, хранящий в себе данные, введенные с блока(Те самые данные, которые я ввожу с блока записываются в этот массив)
я объявляю этот массив в начале программы

в массиве записаны базовые стартовые значения.

в массиве names записаны названия, которые выводятся на экране
iMax, error, pReg, iReg, dReg, lasterror, control — переменные PID-регулятора.
PID-регулятор состоит из 3 составляющих:
p — чем сильнее робот отклонился от желаемого значения, тем сильнее он будет поворачивать.
i – вернуть объект в желаемое состояние в тех случаях, когда управляющего воздействия П-регулятора недостаточно.
d — препятствовать перерегулированию.
День 3
Дата: 2025-03-11
Имя: Варя
Задачи на сегодняшнее занятие:
- Написать подпрограмму, для резких поворотов на линии
Проблемы:
- Не проходит резких поворотов
Решения:
- Написала волновой регулятор
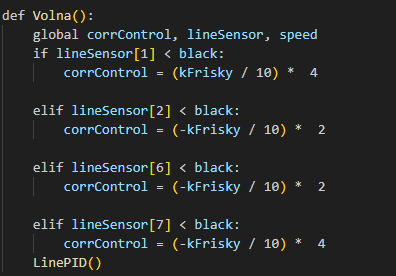
В этой подпрограмме я и вызываю движение по линии, о котором я писала выше.
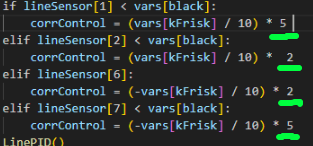
Алгоритм работы данной подпрограммы:
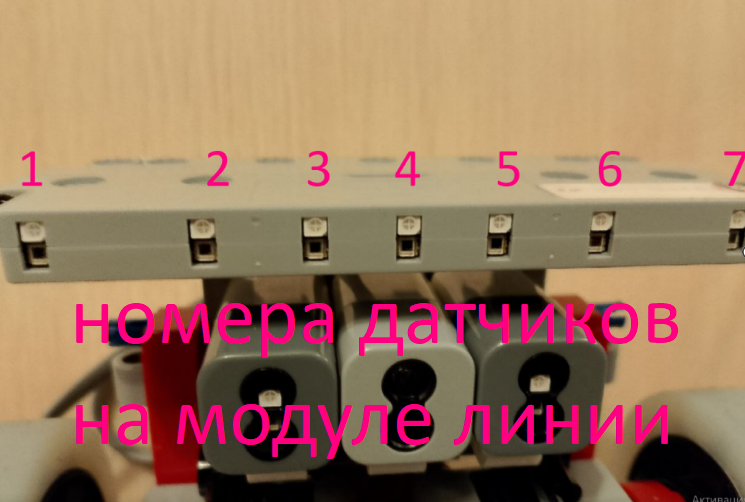
если 1 датчик на модуле линии зацепился за линию:
то добавляем к control(сумме всех воздействий) доп. воздействие для резкого поворота(формула была выявлена во время исследовательской отладки опытным путем)
иначе если 2 датчик на модуле линии зацепился за линию:
то добавляем к control воздействие меньше, так как поворот должен быть меньше в такой ситуации.
иначе если 6 датчик зацепился за линию:
то добавляем такое же воздействие, но в другую сторону
иначе если 7 датчик(последний) заметил линию:
то добавляем такое же воздействие как и с 1 датчиком модуле линии, но в другую сторону)
День 4
Дата: 2025-03-13
Имя: Варвара
Задачи на сегодняшнее занятие:
Проблемы:
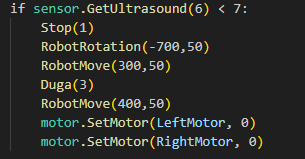
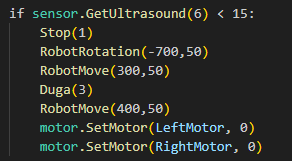
- Некорректно определяет расстояние до объекта
- Неправильно объезжает препятствие
Решения:
- Увеличила расстояние до объекта
Подпрограммы использованные в условии выше
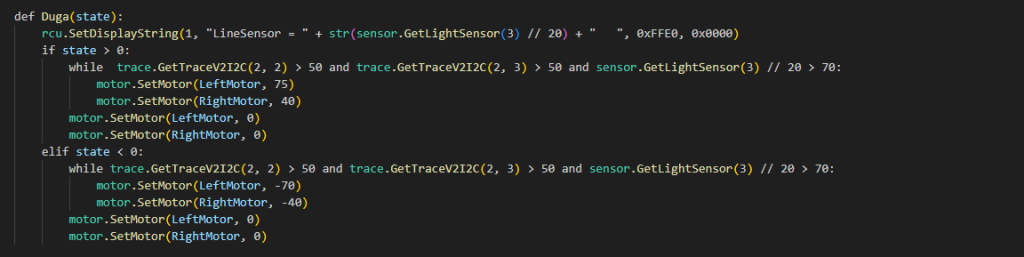
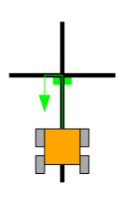
- Создала функцию WaitLine с использованием датчика света:
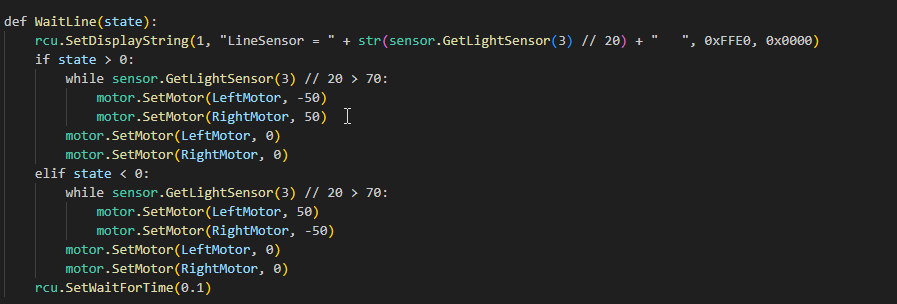
подпрограмма работает следующим образом:
если state > 0: (сделала чтобы регулировать в какую сторону искать линию)
то пока не черный свет — робот делает дугу вправо:
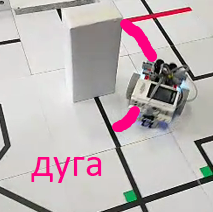
иначе если state < 0:
совершает дугу в другую сторону — налево.
Выше я показала видео, где используется функция waitline. Это сама функция waitline:
День 5
Дата: 2025-03-18
Имя: Варвара
Задачи на сегодняшний день:
- попробовать сделать чтение меток с помощью 2 датчиков цвета
Проблемы:
- Робот некорректно определяет две метки сразу
Решения:
- Не смогла решить
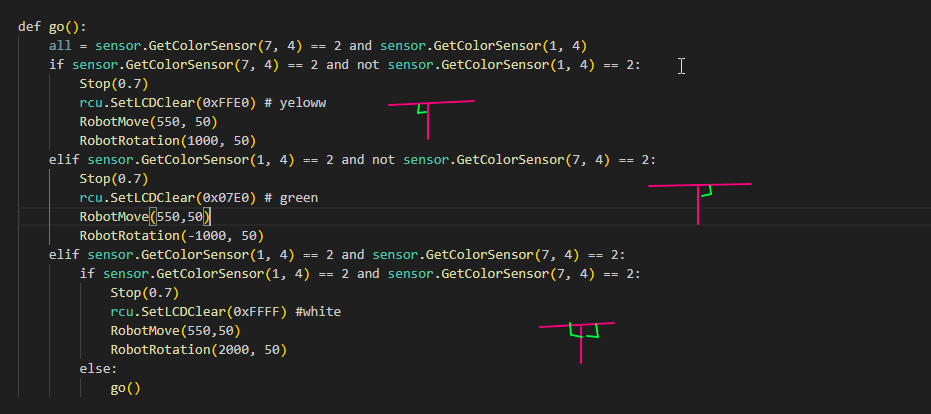
Вот, что у меня получилось за занятие
робот заливает экран желтым цветом, когда хочет повернуть налево, а если направо, — то зеленым. Если разворот — белым. На видео робот ошибочно разворачивается на 2 метках сразу.
День 6
Дата: 2025-03-20
Имя: Варя
Задачи на сегодняшний день:
- закончить отладку чтение меток
Проблемы:
- Робот неровно заезжает на метки, что способствует некорректному чтению меток
Решение:
- Подправила коэффициенты. На какое-то время помогло
День 7
Дата: 2025-03-25
Имя: Варя
У меня все сломалось!( Робот ужасно проезжает, путается.
Проблема:
- Слетает с линии
- На поворотах слетает
- Плохо проходит разрыв
Решение:
- Решила переписать программу
- Поменяла коэффициенты
День 8
Дата: 2025-03-27
Имя: Варя
Ничего не работает, робот живет своей жизнью…Походу придется делать костыли для разных поворотов. Буду отлаживать прямо на полигоне на соревнованиях, так как там будет другое освещение, клетки(может быть грязные клетки) и придется все настраивать заново(
Сейчас попытаюсь исправить алгоритм движения робота.
я увеличила резкость робота, и теперь все вроде стало лучше.
День 9
Дата: 2025-04-01
Имя: Варя
Соревнования уже через 4 дня, у меня опять какие-то неполадки с роботом. он то спокойно, без расшатывания едет по линии, то на сложных поворотах не может преодолеть линию — то перерегулирование, то коэффициенты слишком маленькие. Ставлю больше — на прямых участках перерегулирование. и все равно не проходит линию. Я решила, что буду отлаживать прямо на соревнованиях, потому, что я понимаю, что на соревнованиях будет другой свет, другие клетки(могут быть грязнее, чем у меня) На соревнованиях буду делать костыли под каждые препятствия.
День 10
Дата: 2025-04-05
Имя: Варя
И вот настал день соревнований. Я увеличила коэффициенты
Робот стал ездить медленнее, но зато более точно. я думаю, что попытку робот пройдет хорошо
Прошла попытка, ничего не получилось. за две попытки 35 баллов…Надеюсь хоть на 3 попытке повезет
День 11
Дата: 2025-04-06
Имя: Варя
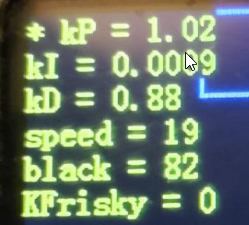
Скоро 3 попытка. Стоят такие коэффициенты:
Потом покажу как прошла попытка
Попытка прошла ужасно, 45 баллов. Зато лучше, чем прошлые. Надеюсь, что инженерный журнал и плакат засчитают.